最大流 问题背景
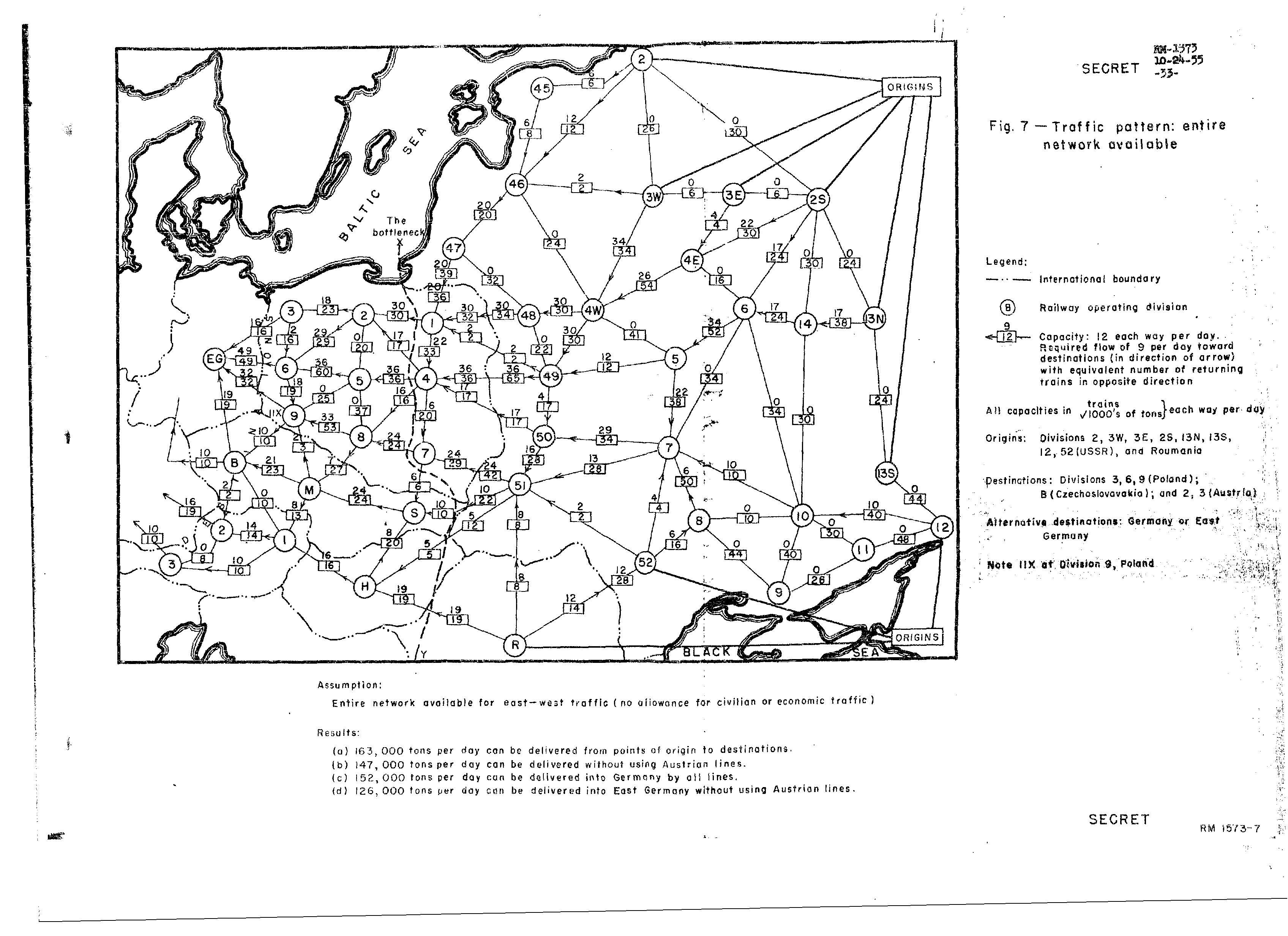
上世纪 50 年代中期,美国空军研究员 Theodore E. Harris 和退伍少将 Frank S. Ross 联合写了一份研究苏联到其东欧卫星国铁路网的报告,该报告于 1999 年解密
容量
容量$c: \ec \mapsto \rb^+$是非负实值函数
容量限制:对$\forall (u,v) \in \ec$有$0 \le f(u,v) \le c(u,v)$
- $f(u,v) = c(u,v)$,流$f$充斥 (saturate) 于边$(u,v)$
- $f(u,v) = 0$,流$f$回避 (avoid) 了边$(u,v)$
满足容量限制的流称为可行的 (feasible)

最大流问题
\begin{align} & \begin{cases} f(s,v_1) = 11 \\ f(s,v_2) = 8 \\ f(v_1,v_3) = 12 \\ f(v_2,v_1) = 1 \\ f(v_2,v_4) = 11 \\ f(v_3,v_2) = 4 \\ f(v_4,v_3) = 7 \\ f(v_3,t) = 15 \\ f(v_4,t) = 4 \end{cases} \\[10px] & |f| = \sum_{v \in \vc} f(s,v) - \sum_{v \in \vc} f(v,s) = 11 + 8 = 19 \end{align}
最大流问题:在给定的流网络中找一个流值最大的流

两个约定
流网络中无反向平行边
对反向平行边$(v_1,v_2)$、$(v_2,v_1)$,选择其中一条,比如$(v_1,v_2)$,加入新结点$v$,将其分为两条边$(v_1,v)$和$(v,v_2)$,并将两条边的容量设为被替代掉的边的容量,即$c(v_1,v) = c(v,v_2) = c(v_1,v_2)$
可以证明,转换后的网络与原网络等价

两个约定
流网络中只有单一的源点和汇点
加入超级源点$s$和超级汇点$t$,$c(s,s_i) = \infty$,$c(t_j,t) = \infty$
可以证明,转换后的网络与原网络等价

切割

切割$(\sc, \tc)$:$\sc = \{ s, v_1, v_2 \}$,$\tc = \{ t, v_3, v_4 \}$
切割$(\sc,\tc)$的容量$c(\sc, \tc) = 12 + 14 = 26$
该切割不是最小切割,$(\{s,v_1,v_2,v_4\},\{v_3,t\})$是更小的切割
最大流最小切割定理
对任意流网络,存在最大流等于最小切割
- 1954 年 Lester Randolph Ford Jr.、Delbert Ray Fulkerson 证明
- 1956 年 Peter Elias、Amiel Feinstein、Claude Shannon 证明

最大流最小切割定理是线性规划中强对偶成立的一个特例
证明 残存网络
残存网络$\gc_f = (\vc, \ec_f)$中边$(u,v)$的残存容量$c_f(u,v)$定义为
\begin{align} c_f(u,v) = \begin{cases} c(u,v) - f(u,v), & (u,v) \in \ec \\ f(v,u), & (v,u) \in \ec \\ 0, & 其它 \end{cases} \end{align}

残存容量定义中的前两种情形是互斥的,因为我们约定了给定的流网络中不存在反向平行边
证明 增广路径
给定流网络$\gc = (\vc, \ec)$和流$f$,设$p$是残存网络$\gc_f$中一条从源点$s$到汇点$t$的路径,称为增广路径 (augmenting path)
增广路径的残存容量是所有边上残存容量的最小值
\begin{align} c_f (p) = \min \{ c_f (u,v): (u,v) \in p \} \end{align}
下图蓝色边构成一条增广路径,$c_f (p) = \min \{ 5,4,5 \} = 4$

证明 增广路径
若残存网络$\gc_f$包含增广路径,则可根据残存容量增加流
\begin{align} f'(u,v) = \begin{cases} f(u,v) + c_f(p), & (u,v) \in p \\ f(u,v) - c_f(p), & (v,u) \in p \\ f(u,v), & 其它 \end{cases} \end{align}
增广路径的残存容量为$4$,原流网络的流值可以增大$4$

例子 深度优先 递归

流值变化$0 \overset{+4}{\longrightarrow} 4 \overset{+8}{\longrightarrow} 12 \overset{+7}{\longrightarrow} 19 \overset{+4}{\longrightarrow} 23$
例子 深度优先 递归

流值变化$0 \overset{+4}{\longrightarrow} 4 \overset{+8}{\longrightarrow} 12 \overset{+7}{\longrightarrow} 19 \overset{+4}{\longrightarrow} 23$
例子 深度优先 栈

流值变化$0 \overset{+4}{\longrightarrow} 4 \overset{+7}{\longrightarrow} 11 \overset{+12}{\longrightarrow} 23$
例子 深度优先 栈

流值变化$0 \overset{+4}{\longrightarrow} 4 \overset{+7}{\longrightarrow} 11 \overset{+12}{\longrightarrow} 23$
例子 广度优先 队列

流值变化$0 \overset{+12}{\longrightarrow} 12 \overset{+4}{\longrightarrow} 16 \overset{+7}{\longrightarrow} 23$
例子 广度优先 队列

流值变化$0 \overset{+12}{\longrightarrow} 12 \overset{+4}{\longrightarrow} 16 \overset{+7}{\longrightarrow} 23$
例子 边数最多

流值变化$0 \overset{+4}{\longrightarrow} 4 \overset{+4}{\longrightarrow} 8 \overset{+4}{\longrightarrow} 12 \overset{+4}{\longrightarrow} 16 \overset{+3}{\longrightarrow} 19 \overset{+1}{\longrightarrow} 20 \overset{+3}{\longrightarrow} 23$
例子 边数最多

流值变化$0 \overset{+4}{\longrightarrow} 4 \overset{+4}{\longrightarrow} 8 \overset{+4}{\longrightarrow} 12 \overset{+4}{\longrightarrow} 16 \overset{+3}{\longrightarrow} 19 \overset{+1}{\longrightarrow} 20 \overset{+3}{\longrightarrow} 23$
例子 边数最多

流值变化$0 \overset{+4}{\longrightarrow} 4 \overset{+4}{\longrightarrow} 8 \overset{+4}{\longrightarrow} 12 \overset{+4}{\longrightarrow} 16 \overset{+3}{\longrightarrow} 19 \overset{+1}{\longrightarrow} 20 \overset{+3}{\longrightarrow} 23$
例子 边数最多

流值变化$0 \overset{+4}{\longrightarrow} 4 \overset{+4}{\longrightarrow} 8 \overset{+4}{\longrightarrow} 12 \overset{+4}{\longrightarrow} 16 \overset{+3}{\longrightarrow} 19 \overset{+1}{\longrightarrow} 20 \overset{+3}{\longrightarrow} 23$
例子 残存容量最大

流值变化$0 \overset{+12}{\longrightarrow} 12 \overset{+7}{\longrightarrow} 19 \overset{+4}{\longrightarrow} 23$
例子 残存容量最大

流值变化$0 \overset{+12}{\longrightarrow} 12 \overset{+7}{\longrightarrow} 19 \overset{+4}{\longrightarrow} 23$
算法分析
Jack Edmonds、Richard Karp 发现时间复杂度$O(|\ec| |f^\star|)$是紧的
- 最多边数的增广路径,每轮流值加$1$,$|f^\star| = 2 X$,迭代$\Theta(|f^\star|)$轮
- 表示$X$只需$\Theta(\lg X)$比特,因此算法最坏情况下时间复杂度是指数级

无理数容量
1993 年,Uri Zwick 提出如下 6 个点的流网络,其中$\phi$为黄金分割比,满足$\phi^2 + \phi = 1$

假设第$1$轮的增广路径为$s \rightarrow b \rightarrow c \rightarrow t$,之后中间三条边的残存容量分别为$1$、$0$、$\phi$
无理数容量
假设某轮后中间三条边的残存容量分别为$\phi^{k-1}$、$0$、$\phi^k$

| 轮次 | 增广路径 | 流值增量 | 残存容量 |
|---|---|---|---|
| $1$ | $(B)$ | $\phi^k$ | $\phi^{k-1} - \phi^k = \phi^{k+1}$、$\phi^k$、$0$ |
| $2$ | $(C)$ | $\phi^k$ | $\phi^{k+1}$、$0$、$\phi^k$ |
| $3$ | $(B)$ | $\phi^{k+1}$ | $0$、$\phi^{k+1}$、$\phi^k - \phi^{k+1} = \phi^{k+2}$ |
| $4$ | $(A)$ | $\phi^{k+1}$ | $\phi^{k+1}$、$0$、$\phi^{k+2}$ |
每$4$轮一个周期,残存容量从$\phi^{k-1}$、$0$、$\phi^k$变为$\phi^{k+1}$、$0$、$\phi^{k+2}$
流分解定理 证明
在流网络中添加边$(t,s)$并令$f(t,s) = |f|$,于是流网络流值为零且所有点流量守恒,这样的流称为环流 (circulation)
引理:任意环流$f$可分解为不超过$\max\{ 0, \# f - 1 \}$个有向环的正线性组合,其中$\# f = \{ |(u,v)| \mid f(u,v) > 0 \}$为有非零流量的边数

最大边不相交路径数
任给有向图,求任意两点间的最大边不相交路径数
下图$s \rightsquigarrow t$有 3 条边不相交的路径,是否为最大?


归约为单位容量的流网络的最大流问题
点容量限制
归约遍历所有点和边,时间复杂度为$O(|\vc| + |\ec|) = O(|\ec|)$

最大点不相交路径数
给每个点的容量设为$1$,求最大流即可

匹配 最大匹配
匹配:无向图$\gc = (\vc, \ec)$的匹配 (matching) 是边的子集$\mc \subseteq \ec$,使得对$\forall v$,子集$\mc$中最多只有一条边与$v$相连
最大匹配:若$\mc$是最大匹配,则对任意匹配$\mc'$有$|\mc| \ge |\mc'|$

最大二分匹配
归约为流网络$\gc' = \{ \vc', \ec' \}$中的最大流问题
- $\vc' = \vc \cup \{ s, t \}$
- $\ec' = \ec \cup \{ (s, u) \mid u \in \lc \} \cup \{ (v,t) \mid v \in \rc \}$
- 每条边上的容量为单位容量,即对$\forall (u,v) \in \ec'$有$c(u,v) = 1$

交替路径
交替路径:从$\lc$中某个不属于匹配的点到$\rc$中某个不属于匹配的点的路径,其中的边交替属于或不属于匹配
Ford-Fulkerson 算法迭代寻找增广路径的过程就是在原二分图中寻找交替路径的过程,每找到一条交替路径,匹配数加$1$

1957年,Claude Berge研究了通过交替路径来寻找最大二分匹配,独立于最大流最小切割的研究;1973年,John Hopcroft、Richard Karp通过每轮寻找多个交替路径,将时间复杂度降到$O(\sqrt{|\vc|} |\ec|)$
不相交路径覆盖数
根据$\gc$,构建二分图$\gc'$
- 对任意点$v$,替换为两个点$v_l$、$v_r$
- 对任意有向边$(u,v)$,替换为无向边$(u_r, v_l)$

$\gc$可被$k$条不相交路径覆盖当且仅当$\gc'$中存在$|\vc| - k$的匹配
不相交路径覆盖数
